Elimine los problemas de integración de los controladores, reduzca los costes de desarrollo y acelere la salida al mercado
Las operaciones de fabricación en todo el mundo se han visto significativamente afectadas por el COVID-19. Las industrias siguen sufriendo la escasez de mano de obra, y la situación ha acelerado la adopción de soluciones inteligentes en el sector de la fabricación.
De las soluciones inteligentes disponibles, los robots móviles autónomos (AMR) desempeñarán un papel importante en la fabricación inteligente. Según un informe de Inkwood Research, de 2021 a 2028, el mercado de AMR experimentará una CAGR del 23,43% y alcanzará los 10.000 millones de dólares. Este prometedor potencial ha atraído a numerosos gigantes industriales y startups para unirse al mercado de la AMR.
Sin embargo, el desarrollo de AMR implica la integración de diversos sistemas y componentes, lo que requiere muchos recursos humanos, tiempo y costes. Si el calendario de desarrollo se retrasa, se perderá la oportunidad de mercado.
La solución software EtheCAT + ROS2 presentada por Adlink acelera la salida al mercado de soluciones AMR minimizando es esfuerzo de desarrollo y reduciendo al máximo el coste de implementación.
 |
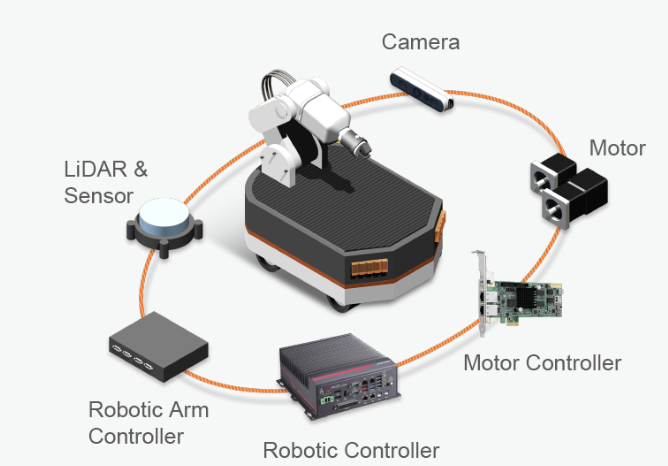 |
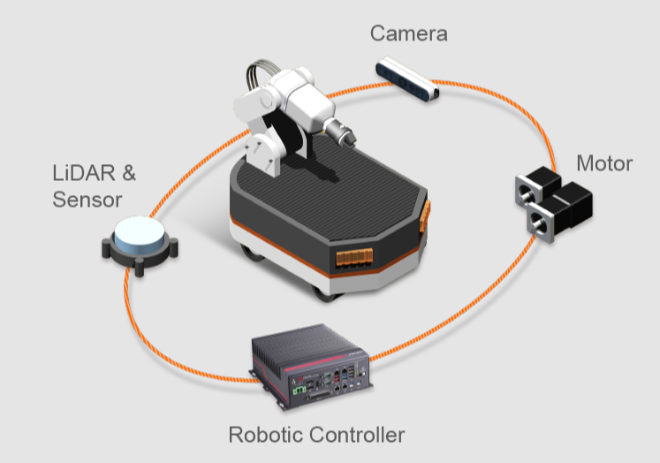
| EtherCAT definido por software + ROS 2 Arquitectura AMR | Arquitectura tradicional de AMR |
Solución EtherCAT definida por software + ROS 2
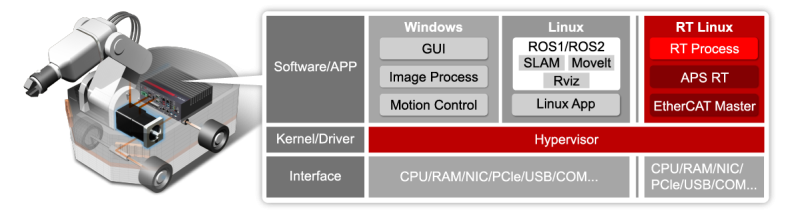
El controlador ROS 2 puede controlar directamente el funcionamiento de motores y brazos robóticos a través del protocolo de comunicación EtherCAT, lo que no sólo elimina los costes de hardware de los controladores de motores y brazos robóticos, sino que también ahorra el tiempo que se emplearía en integrar el controlador de navegación con los controladores de motores y brazos robóticos.
La tecnología EtherCAT se utiliza habitualmente para el control industrial, lo que reduce la dependencia de proveedores específicos de motores y brazos robóticos, y flexibiliza el desarrollo y la producción de AMR.
Panasonic adoptó la solución EtherCAT + ROS 2 definida por software de ADLINK y la integró con su motor EtherCAT para completar el desarrollo de AMR en sólo dos meses. Esta solución de desarrollo rápido hizo su debut en la Exposición Internacional de Robots (iREX) en Japón en marzo de 2022.
Descubra en QNV.com las últimas soluciones en controladores basados en ROS2
 |
|
|
| ROScube-I Controlador robótico ROS 2 basado en procesadores Intel® Core™ |
ROScube-X Controlador Robótico ROS 2 basado en módulo NVIDIA® Jetson AGX Xavier™ |
ROScube-A Controlador robótico ROS 2 basado en procesadores Intel® Atom™ |