Robots Autónomos ROS2
ROS 2 Robots Autónomos
La solución software EtheCAT + ROS2 presentada por Adlink y disponible en QNV permite acelerar la salida al mercado de soluciones AMR minimizando el esfuerzo de desarrollo y reduciendo al máximo el coste de implementación.
El controlador ROS 2 puede controlar directamente el funcionamiento de motores y brazos robóticos a través del protocolo de comunicación EtherCAT, lo que no sólo elimina los costes de hardware de los controladores de motores y brazos robóticos, sino que también ahorra el tiempo que se emplearía en integrar el controlador de navegación con los controladores de motores y brazos robóticos.
La tecnología EtherCAT se utiliza habitualmente para el control industrial, lo que reduce la dependencia de proveedores específicos de motores y brazos robóticos, y flexibiliza el desarrollo y la producción de AMR.
PRODUCTOS Relacionados con ROS2

ROS2 - Robots autónomos
Controlador robótico ROS2 de ADLINK basado en NVIDIA® Jetson™ y cámaras C1 GMSL2 de TIER IV

ROS2 - Robots autónomos
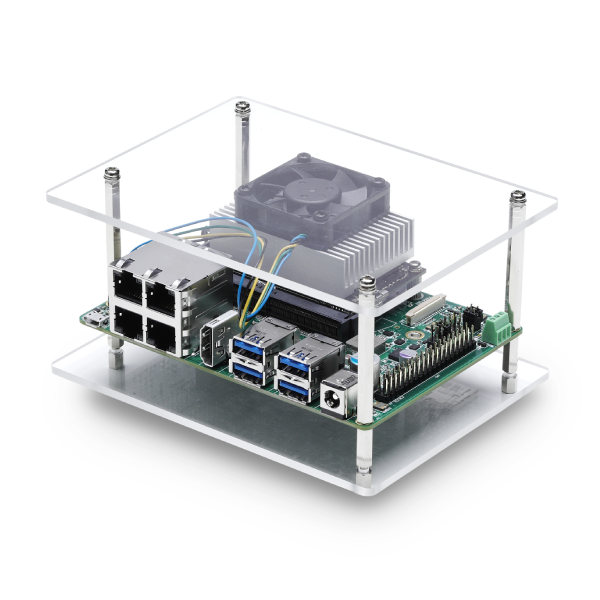
Robotic controller embedded ROS 2 powered by módulo NVIDIA® Jetson AGX Orin™


ROS2 - Robots autónomos
Expandable ROS2 Robotic Controller with Intel® 9th Gen Core Processor

ROS2 - Robots autónomos
Kit de desarrollo ROScube para la plataforma basada en NVIDIA® Jetson SOM
PRODUCTOS Relacionados con control de motores para aplicaciones en robótica



Comunicaciones Industriales
Controlador EtherCAT Master basado en procesador Intel Atom E3845 a 1.9GHz



Comunicaciones Industriales
Chasis EtherCAT con acoplador de bus Ethercat EPS-6000
Contenido relacionado

Creciendo de forma sostenible: QNV completa el Programa de Proveedores Sostenibles
En QNV creemos que la sostenibilidad no es una opción, sino un compromiso. Por eso, [...]
Leer másJul


